
Xiaomi Hyper Autonomous Driving
小米智能驾驶
端到端全场景智能驾驶
小米端到端大模型
从模仿变裁判 甄选 「正确答案」
区别于传统智驾,端到端将决策判定方式从"模仿学习"转变为"裁判式多选项优选",
可以瞬间生成多种应对方案,并在其中判定选取 「最优解」 。
可以瞬间生成多种应对方案,并在其中判定选取 「最优解」 。
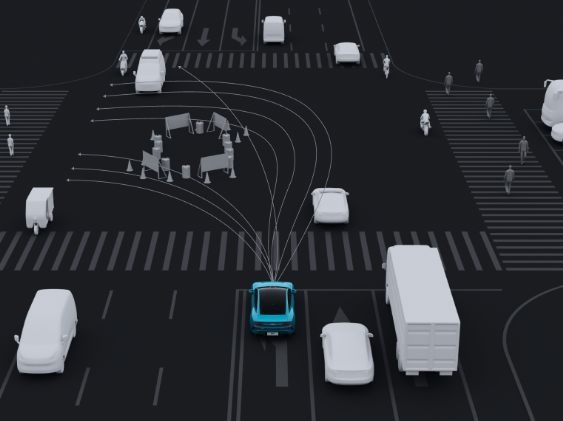
枚举所有可能轨迹
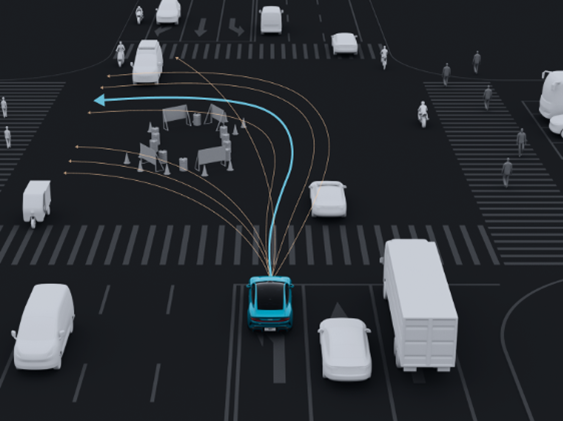
对轨迹进行多维度评价 筛选出最优解
Xiaomi HAD 车位到车位
上车就能用

路边启动 上车就能用
路边车位,上车既可开启智驾功能

ETC / 闸机 通行
精准识别,通行无阻

窄路 / 环岛通行
勇闯胡同,辗转藤挪游刃有余

停车场漫游寻位泊车
目标车位被占,漫游寻找空车位
漫游寻位泊车
终点停车场代客泊车的目标位被占,全场景智驾依旧不会退出,
车辆会自己继续向前行驶寻找空车位并泊入,车位到车位的体验可用性进一步加强。
车辆会自己继续向前行驶寻找空车位并泊入,车位到车位的体验可用性进一步加强。
